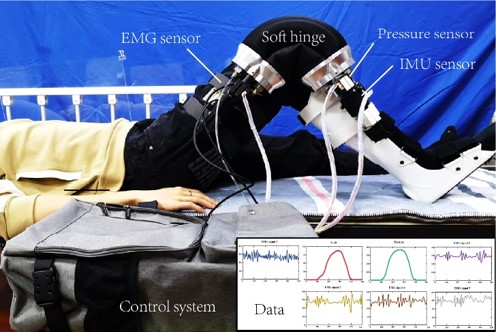
项目集成传感和控制技术,有助于控制身体运动,评估康复训练的效果控制,确保康复机器人按预期运动。开发了新颖、轻质量、柔性驱动、刚-柔-软体耦合的下肢外骨骼康复机器人,适用于不同类型的患者。
基于织物和弹性体材料,研制了一种可实现双向弯曲变形的、大角度驱动的气动人工肌肉,实现对康复机器人的主动柔软性驱动。研制下肢外骨骼康复机器人便携式电子气动控制系统、板载控制单元,实现压力伺服及位置闭环的双反馈控制及基于肌电信号的主动控制。
团队聚焦康复机器人领域,开发系列化康复机器人产品,打造国际一流康复机器人转化平台。