自动驾驶、无人自主系统对智能服务机器人等核心技术瓶颈包括精确环境感知交互技术,多场景中自主控制技术。研究团队以视觉为主制定低成本解决方案,实现了复杂环境中的SLAM系统及非结构化环境中视觉伺服控制。
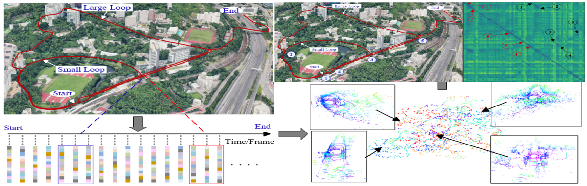
基于深度学习的视觉里程计和LiDAR里程计,为了消除里程计带来的累积误差,提出基于深度学习的视觉场景识别与点云回环检测与矫正算法,建得的地图具有全局一致性。在多个领域具有广泛应用前景,如无人车驾驶、物流机器人、自主无人侦察机等。
相关研究已获批2021年度深圳市重点领域技术攻关类项目资助。